Navegación autónoma en entornos no estructurados RoboticsLab URJC
Aportaciones del grupo RoboticsLab de la Universidad Rey Juan Carlos para la aplicación de robótica avanzada en la gestión de inc…

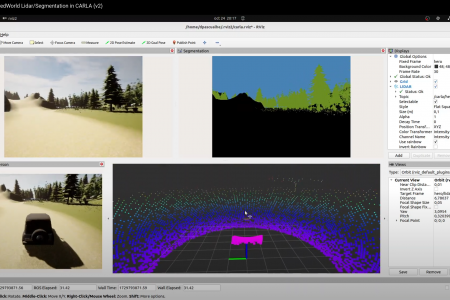
Desde el Proyecto GAIA estamos desarrollado entornos realistas en exteriores para realizar navegación terrestre inteligente utilizando el simulador de código abierto CARLA.
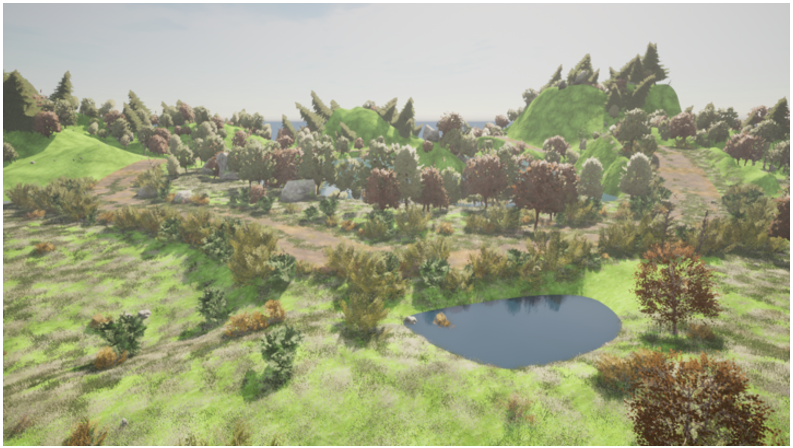
A través de CARLA, es posible entrenar y evaluar modelos de navegación en escenarios complejos, similares a los que se encuentran en entornos exteriores no estructurados. Estos escenarios incluyen terrenos irregulares, vegetación y condiciones cambiantes como los mostrados en el víde: https://www.youtube.com/watch?v=Zoy12gF2pFw

Seguimos trabajando para incorporar datos de sensores LiDAR en el proceso de navegación inteligente, mejorando la fiabilidad y robustez de los algoritmos de toma de decisiones aplicados a la gestión y extinción de incendios forestales, donde estas tecnologías pueden marcar la diferencia.